



中国科学院自動化研究所のチームは、電力線の巡回点検を行うハイブリッドロボットのための新しい軌道計画法を初めて提案しました。この方法は、50ミリ秒以内に軌道を生成でき、ハイブリッドロボットの自主的な着陸と障害物越えの時間を大幅に短縮しました。この研究に関する論文「Model-Based Trajectory Planning of a Hybrid Robot for Powerline Inspection」は、IEEE Robotics and Automation Letters(IEEE RAL)およびIROS 2024に受理されました。
NOKOVモーションキャプチャシステムは、ハイブリッドロボットの状態を推定するための高精度位置データを研究に提供し、実環境における提案手法の有効性を検証するのに役立つ。
引用形式
Z. Li et al., "Model-Based Trajectory Planning of a Hybrid Robot for Powerline Inspection," in IEEE Robotics and Automation Letters, vol. 9, no. 4, pp. 3443-3450, April 2024, doi: 10.1109/LRA.2024.3363535.
研究背景
定期的な電力線の点検は、安全で信頼性のある電力の伝送を確保し、危険を未然に防ぎ、電力網の効率を最適化するために非常に重要です。クライミングロボットは電力線に沿って移動し、高精度かつ長距離の点検を可能にしますが、障害物の回避には困難があります。ドローンは電力線を飛び越えながら点検を行い、高い柔軟性を提供しますが、持続時間に限界があります。ハイブリッドロボットは、クライミングロボットとドローンの利点を組み合わせ、高い機動性と長時間の持続能力を実現することを目的としています。
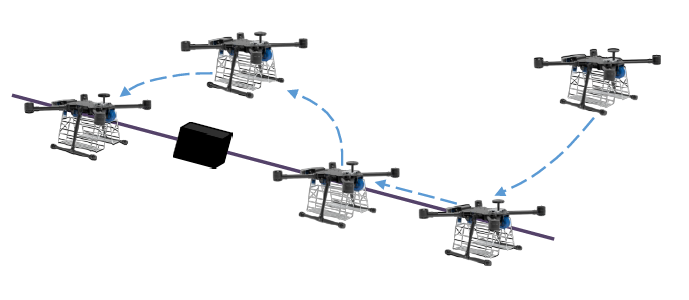
ハイブリッドロボットによる電力線巡回点検のフロー図
しかし、ハイブリッドロボットに関する研究は主にプラットフォームの設計と自主着陸に集中しており、軌道計画には十分な関心が払われていません。これはハイブリッドロボットの自主巡回の実現において重要な要素です。本研究は、ハイブリッドロボットの軌道計画の空白を埋めるための新しい方法を提案します。軌道計画問題を非線形計画問題としてモデル化し、動的および幾何学的制約をハード制約として設定し、点検の質を最適化のコスト関数として考慮しました。この方法の有効性は、十分なシミュレーション実験と実世界の実験を通じて検証されました。
本文の貢献
1. ハイブリッドロボットによる電力線点検のための軌道生成法を提案し、着陸と障害物回避ナビゲーションの時間コストを大幅に削減しました。
2. 精密な着陸と電力線の視認性を最大化するための解析式を含む、ハイブリッドロボット電力線点検のための一般的な幾何学モデルを提案しました。
3. 提案された方法の有効性を十分なシミュレーション実験と実世界の実験を通じて検証しました。
実験過程
研究チームは、提案した軌道計画法をハイブリッドロボットプラットフォームで検証した。ロボット、送電線、障害物の位置データはNOKOVモーションキャプチャシステムで取得し、ロボットの状態推定は拡張カルマンフィルタ(EKF)で実現した。
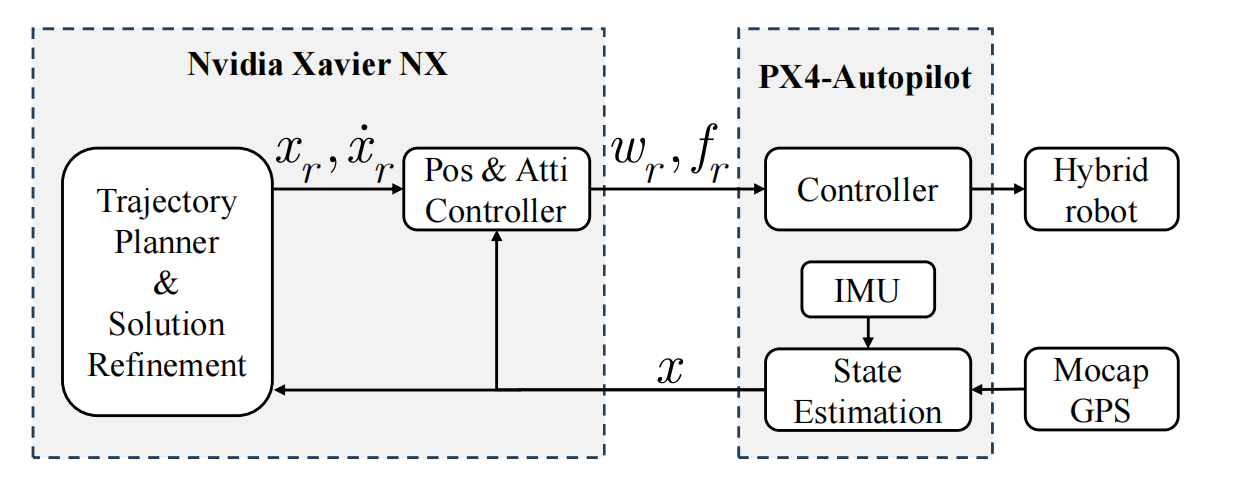
ハイブリッドロボットシステムのフレームワーク
実環境における本手法の有効性を検証するため、研究者らは屋内に送電線と障害物を設置した送電シナリオのシミュレーションを構築し、軌道計画と軌道追跡の実験を行った。
実験の結果、計画された軌道は常にロボットを送電線の真上に位置させ、送電線の視認性を最大化することができ、最終的にロボットは障害物を越え、送電線にうまく着地することができた。
NOKOVモーションキャプチャシステムは、ハイブリッドロボットの状態を推定するのに役立つ高精度の位置データを提供することにより、実環境における上記の軌道計画法の有効性を検証する。
著者紹介
Zhishuo Liは、中国科学院自動化研究所(IAAS)産業ビジョン・知能設備技術工学研究室の博士候補生。
Yunong Tian、中国科学院自動化研究所工業視覚・知能設備技術工学研究室副研究員。主な研究分野は特殊ロボット工学、具現化知能、視覚サーボ。
中国科学院自動化研究所工業視覚・知能設備技術工学研究室研究員。主な研究分野はロボット工学と無人自律システムの研究と応用。
中国科学院自動化研究所マルチモーダル人工知能システム国家重点研究室博士候補、主な研究テーマはロボット工学と無人自律システムの研究と応用。
エン・リー、中国科学院自動化研究所工業視覚・知能設備技術工程研究室研究員。主な研究テーマは、特殊ロボット工学、ロボット制御技術、インテリジェントセンシング技術の研究と応用。
Zize Liang 中国科学院自動化研究所マルチモーダル人工知能システム国家重点研究室研究員。
中国科学院自動化研究所マルチモーダル人工知能システム国家重点研究室研究員。 主な研究テーマは知能ロボット工学と高度制御。









































































































ここでごニーズを出ること
-
もっと多い情報に関して、メッセージをしたりしてください。
-
- 確認