



危険な交通状況において、歩行者の積極的な回避行動は、車両と歩行者の衝突に関連するけがのリスクに大きな影響を及ぼします。清華大学の研究チームは、バーチャルリアリティ(VR)実験プラットフォームを利用して、衝突前段階での歩行者と車両の相互作用プロセスを定量化し、衝突直前の歩行者の姿勢を抽出しました。これを「衝突前姿勢」と呼びます。この研究は、「車両衝突における歩行者回避行動の動的および運動学的特徴」と題され、Frontiers in Bioengineering and Biotechnology誌に掲載されており、SCIおよびEIにインデックスされています。
この研究では、NOKOVモーションキャプチャシステムと生理学的信号システムを用いて、歩行者の回避反応の動的および運動学的特徴を記録しました。このデータは、歩行者のけがのリスクを分析し、生体に忠実な人体モデル(HBM)を開発し、先進的な車載アクティブセーフティシステムを設計するための重要なサポートを提供します。
引用文献
Li Q, Shang S, Pei X, Wang Q, Zhou Q, and Nie B (2021) Kinetic and Kinematic Features of Pedestrian Avoidance Behavior in Motor Vehicle Conflicts. Front. Bioeng. Biotechnol. 9:783003. doi: 10.3389/fbioe.2021.783003
方法
研究チームは、バーチャルリアリティ(VR)テストプラットフォーム、NOKOVモーションキャプチャシステム、筋電図(EMG)信号キャプチャシステムの3つのモジュールから成る自然な歩行者反応実験プラットフォームを開発しました。VRテストプラットフォームは、非常にリアルな没入型VR交通シナリオを生成し、被験者が通常の聴覚機能、距離感覚、および仮想交通環境内での対話能力を持つことを可能にしました。参加者はVR交通シーンで道路横断行動を行いました。実験者は、被験者が道路に入る直後に緊急車両-歩行者衝突状況を作成し、自然な反応を引き出すために典型的な実世界の歩行者-車両衝突シナリオをシミュレートしました。
歩行者回避行動の特徴抽出
この実験では、NOKOVモーションキャプチャシステムを使用して、歩行者と車両の相互作用中の動的な相対位置を抽出しました。12台のMars 2Hモーションキャプチャカメラを使用して、歩行者の移動速度と加速度、関節の位置、角度データを記録しました。さらに、生理学的信号システムは、下肢筋からの筋電図(EMG)信号を記録し、筋肉の活性化状態を測定し、骨盤運動の特徴をキャプチャしました。
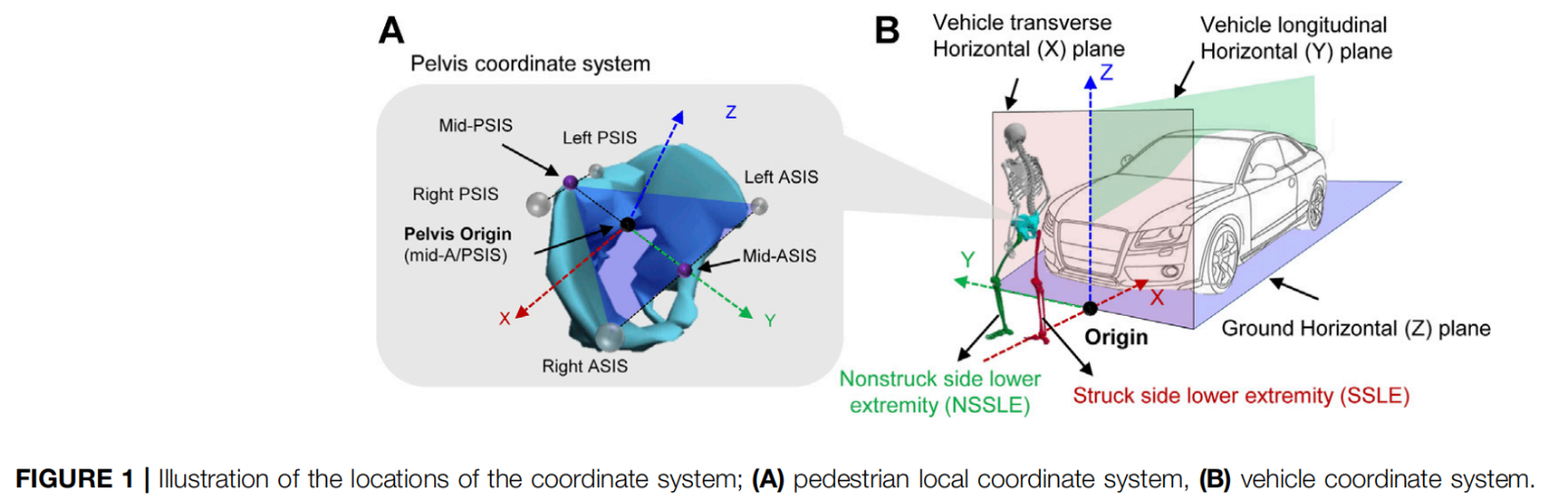
座標系の説明 (A) 歩行者局所座標系 (B) 車両座標系
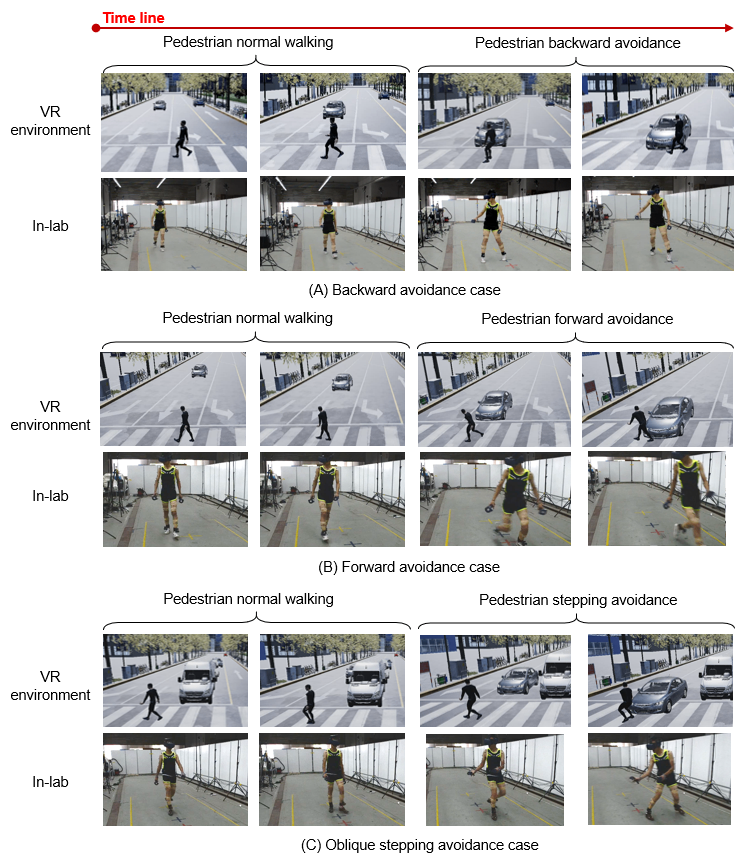
車両-歩行者衝突における代表的な反応カテゴリー
研究チームは、後退回避、前進回避、側方回避の3つの代表的な回避行動カテゴリーを選択し、車両と歩行者の相互作用プロセスを詳細に分析しました。
本研究の貢献
本研究は、歩行者の視点から衝突リスクを評価する新しい視点を提供し、衝突リスク予測研究において以下の2つの重要な貢献を行います。
1. 衝突前の段階での歩行者と車両との相互作用プロセスを定量化し、「衝突前姿勢」として知られる衝突直前の歩行者の姿勢を抽出します。
2. 回避行動が傷害リスクとその重篤度に与える影響を調査する際、本研究の実験データは有限要素(FE)モデルや多体(MB)モデルの開発および衝突時の歩行者傷害リスクをシミュレーションするための貴重な参考資料となります。
NOKOVモーションキャプチャーシステムは、車両との衝突における歩行者の回避反応に関する動力学的および運動学的データを取得します。これには、関節角度、移動速度、加速度が含まれます。この情報は、高精度の人体数値モデルを用いて歩行者の傷害メカニズムを分析するために利用できます。さらに、実際の事故における歩行者の傷害特性を解明し、歩行者の軌跡と傷害リスクを予測するためのデータを提供します。









































































































ここでごニーズを出ること
-
もっと多い情報に関して、メッセージをしたりしてください。
-
- 確認